


Abstract:
We have proposed a method of sensor planning for
mobile robot localization using Bayesian network [
1]. In this system
mobile robot adaptively gathers information to construct a
cause-effect-relation in a Bayesian network, and reconstructs the network for
sensor planning based on an integrated utility function, then
efficient sensing behavior for localization is obtained using
inference of the reconstructed network. Experiments in a real
environment have been conducted.
sensor planning, mobile robot, localization, Bayesian network,
reconstruct
Sensor Planning for Mobile Robot Localization Using Bayesian
Network
- Experiments in a real environment -
*Hongjun Zhou (Chuo University), Shigeyuki Sakane (Chuo University)
In a complex environment, how to localize mobile robot
on its way and navigate it towards a goal is a very
fascinating problem to many researchers. Until now, making a
global map by sensor information
is a mainstream in mobile robot's navigation. A mobile
robot localizes itself based on matching local or global sensor
information to the map, decides its behavior
subsequently by the matching results. However, in the real world,
since a lot of uncertainty factors disturb the navigation, it is
difficult to use the map-based methods.
In this paper we propose adaptive reconstruction of Bayesian
network to localize mobile robot.
Tani[5] avoids error of global measurement focus local
information only and maps it to motor command space directly.
However, this method have no skill recognizing and
distinguishing two sets of patterns that hold same sensor
information.
Asoh et al.[3]
developed a mobile robot which navigates based on a prior-designed
Bayesian Network, But they have not implemented a sensor
planning mechanism.
Thrun[2] localizes a mobile robot using Bayesian analysis
of probabilistic belief. But this method has not implemented
a Bayesian network.
Rimey et al.[4] use Bayes nets to recognize table setting, and
plan the camera's gaze control based on the maximum expected utility
decision rules. However the structure of the Bayes net was fixed.
We use a mobile robot(B14,Real World Interface)(Figure
3) for our
research. The mobile robot is driven basically by potential method.
On a road with no crossings, the mobile robot searches the maximum
value of every glance of sonar scanner, and
track the angular direction of the largest sonar value.
When it comes to a crossing, robot's action is determined by low level
action control. We employ a three-layered Back
Propagation Neural Network(BPNN) to map the 8-direction sonar data of
the front of mobile robot into action commands at crossings.
By taking into account the balance between belief and the sensing
cost, we defined an integrated utility function (Eq. 1)
and a reconstruction algorithm of the Bayesian network for sensor
planning.
 |
(1) |
 denotes the integrated utility (IU) value of
sensing node i,
denotes the integrated utility (IU) value of
sensing node i,
 denotes the sensing cost of
sensing node i,
denotes the sensing cost of
sensing node i,  denotes the Bayesian network's
belief while the mobile robot just obtains the evidence of active
sensing i only, and
denotes the Bayesian network's
belief while the mobile robot just obtains the evidence of active
sensing i only, and
 represents certainty of
the belief of sensing node i which contributes
to the Bayesian network.
represents certainty of
the belief of sensing node i which contributes
to the Bayesian network.
The reconstruction algorithm has two steps [6], STEP (1)
completes the refining process of each local network. In other
words, Bayesian network will be reconstructed from every local network
(active sensing nodes of every crossing) using IU function.
STEP (2) combines local networks to the global Bayesian
network.
To validate the concepts of our system, we perform
some experiments using the mobile robot and it's simulator.
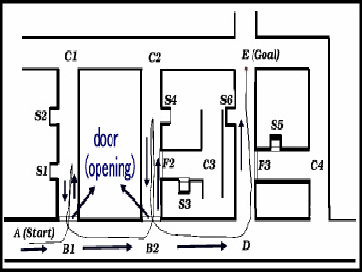
We build an environment to describe the problem as shown in Figure
1.
The mobile robot initially navigates by LLAC, and gathers
information to make CTPs of the sensing nodes and an
original Bayesian network (Figure
2 (a))
In Fig. 1, there are two hidden
crossings (
 ) after passing crossings
) after passing crossings  and
D, respectively.
We assume some hidden states (
and
D, respectively.
We assume some hidden states ( and
and  ) exist in
the Bayesian network. (or ) denotes the
sensing node sets of the hidden crossings
) exist in
the Bayesian network. (or ) denotes the
sensing node sets of the hidden crossings  (or
(or  ), we represent the
causal relation between sensing nodes and hidden state as shown
in Fig. 2 (a) (
), we represent the
causal relation between sensing nodes and hidden state as shown
in Fig. 2 (a) (  and
and  's parent is ;
's parent is ;  and
and  's
parent is ). The sensed evidence will be propagated from
terminal nodes to hidden state node ( or )),
then
's
parent is ). The sensed evidence will be propagated from
terminal nodes to hidden state node ( or )),
then  's belief will be updated by propagation of hidden
node's probability. When the
's belief will be updated by propagation of hidden
node's probability. When the  value
(Fig. 2 (c)) of IU
function is
value
(Fig. 2 (c)) of IU
function is  , the original Bayesian network
(Fig. 2 (a)) is reconstructed
as Fig. 2 (b).
Fig. 1 (down) shows the planned path for
localization of the mobile robot.
, the original Bayesian network
(Fig. 2 (a)) is reconstructed
as Fig. 2 (b).
Fig. 1 (down) shows the planned path for
localization of the mobile robot.
Figure 1:
(left) The mobile robot navigates itself by LLAC and some tutorial
commands to search the goal (E) and gathers the sensor
information actively, then compares the difference of every crossing
to construct the CPTs of every sensing node and original
Bayesian network. (right) The mobile robot is navigated following the
solid line trajectory using inference of reconstructed Bayesian
network
 .
.
|
Figure 2:
Reconstruction of the Bayesian network which has hidden states.
|
To validate our algorithm in real environment, we build an
experimental environment (Figure 4),
and the mobile robot is driven based on a
wall-following algorighm. A CCD camera is mounded on the
robot to recognize the local environment (color landmark).
In the same way as the previous simulation experiments, while the mobile
can't localize itself only by local sensing information, the active
sensing is performed using sonar sensor (looking for some hollows
on the walls). The mobile robot
can observe the local sensor information (landmark) by vision to
decide whether the position is goal. Firstly the mobile robot performs
the active sensing using sonar sensor while it senses the position C isn't goal (Fig.4(left)), and constructs the CPTs of every sensing node. Consequently, the robot balances the
localization belief and sensing cost to reconstruct the Bayesian
network, then plans it's active sensing action to gather the
sensing information and infer the localization of itself based on
the reconstructed Bayesian network (Fig.4(right)).
Figure 3:
(left) We build a real environment like simulation.
(right) We use B14 mobile robot which mounted a camera to
observe the local sensing information. The robot actively gathers
sensing information via sonar sensor. Since the local
environment(opened doors) is identical, the uncertainty of
localization is occured, and the mobile robot turns right controled by
LLAC to attempt to look for the goal.
|
Figure 4:
(left) The mobile robot turns back and gathers the active information
for Bayesian network construction, while it senses the position C
isn't goal based on vision;
(right) Sensor planning for the mobile robot localization with
reconstructed Bayesian network. The robot turns back at the midway of
the corridor and havn't necessary to arrive the bottom.
|
In this paper we conduct some real robot experiments to validate our
concept based on an integrated utility function [6].
The system balances the sensing cost and localization belief, and
reconstructs the Bayesian network via this function.
The mobile robot plans the sensor action using this
reconstructed Bayesian network to localize itself.
The results of experiments demonstrate the IU function and our
reconstruction algorithm effectively cope with the
some real environments and complex hierarchical Bayesian network.
In the future, we will attempt to learn the structure of Bayesian
network from CPTs, and validate our concept using other application.
- 1
-
T.Dean et al.,Artificial Intelligence, The Benjamin/Cummings, 1995.
- 2
-
S.Thrun, ``Bayesian landmark learning for mobile robot localization'',
Machine Learning 33, 41-76, 1998.
- 3
-
H.Asoh, Y.Motomura, I.Hara, S.Akaho, S.Hayamizu, and T.Matsui,
``Combining probabilistic map and dialog for robust life-long office
navigation'', IROS'96, pp.880-885, 1997.
- 4
-
R.D.Rimey and C.M.Brown,'' Where to look next using a Bayes
nets, Incorporating geometric relations'', Proc. European
Conference on Computer Vision, 1992.
- 5
-
J.Tani,''Model-based learning for mobile robot navigation from the
dynamic Systems Perspective'',IEEE Trans.on SMC,
Part B (Special Issue on Robot Learning),Vol.10,No.1,pp153-159.1977.
- 6
-
H.J.Zhou S.Sakane, ``Sensor Planning for Mobile Robot Localization
Using Bayesian Network Inference'', ISATP'2001, pp.7-12, 2001.
- 7
-
H.J.Zhou S.Sakane, ``Sensor Planning for Mobile Robot Localization
-An approach using Baysian network inference-'', RSJ'2000, Vol.3, pp.991-992,2000.
Sensor Planning for Mobile Robot Localization Using Bayesian
Network
- Experiments in a real environment -
This document was generated using the
LaTeX2HTML translator Version 99.2beta8 (1.46)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -local_icons -split 0 rsj2001.tex
The translation was initiated by on 2001-10-09
2001-10-09
![\includegraphics[height=6cm,width=8cm]{env1.eps}](img26.png)
![\includegraphics[height=6cm,width=8cm]{mobile2.eps}](img27.png)
![\includegraphics[height=6cm,width=8cm]{training.eps}](img28.png)
![\includegraphics[height=6cm,width=8cm]{testing.eps}](img29.png)