 図1. PARTNERのシステム構成
図1. PARTNERのシステム構成人間作業の支援に関する研究
1. はじめに
近年、ロボットは製造業を中心とする産業用ロボットから、非製造業や、家庭、オフィス、病院などの様々な環境での利用が広がりつつあります。これに伴い、専門家でないロボット利用者とロボットとのインタフェースをどう構成すべきか、新たなヒューマン・ロボットインタフェースの開拓が望まれています。本研究では、AR(Augmented Reality)の柔軟性をとりいれて、人間からロボットへの作業教示や、ロボットが人間の作業を支援するシステム:PARTNER を構築しています。
2. 人間作業の支援システム
これまでにプロジェクタを使ったインタフェースシステムとしてVOP,IIP,IHPを開発してきました。これらは手の動作によりロボットへ作業を教示するシステムです。これに対して、人間が初めて行う作業をロボットが支援する機能として、AAF (Adaptive AnnotationFunction)を構成しました(図1)。
図1. PARTNERのシステム構成
プロジェクタを用いた支援システムは透過型HMDに比べて多人数の環境に適し、システムも簡単にできます。さらに本システムでは物体の変化と作業者の手を監視して作業方法をガイドします。
3. 作業支援の実験例
図2〜4は本システムを用いてポータブルOHPの組み立て作業を支援する実験例です。このシステムにより、実物の上に作業指示が投影でき、直観的に分かりやすいガイドができます。
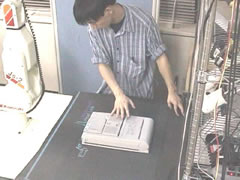 図2. ロックの場所を表示
図2. ロックの場所を表示
 図3. 操作方法を説明
図3. 操作方法を説明
 図4. 引き出す場所を表示
図4. 引き出す場所を表示
![]()